Tenzor je v matematice objekt, který je zobecněním pojmu vektor. Zatímco složky vektoru je možné označit jedním indexem, tenzor může mít více indexů, např. Tato transformace tenzorů je multilineární zobrazení, tedy zobrazení, které je lineární v každé složce. Podobně jako vektor je tenzor, jakožto samostatný objekt vůči reprezentaci v dané soustavě souřadnic invariantní.
Definice a vlastnosti tenzorů
Pokud je n počet indexů tenzoru T, nazýváme T tenzorem n-tého řádu. Rozlišujeme pak dále indexy kovariantní (dolní) a kontravariantní (horní). Má-li tenzor n kovariantních a m kontravariantních složek, jeho index je n+m a jedná se o tenzor typu (n,m).
Metrický tenzor má dvě kovariantní složky, jeho index je tak 2 a typ (0,2). Důvodem pro rozlišování kovariantních a kontravariantních složek je jejich vzájemná odlišnost v transformačních pravidlech. Část matematiky, která při své práci používá tenzory, se označuje jako tenzorový počet.
Máme-li např. dva vektory $\vec{a}$ a $\vec{b}$, můžeme z nich vytvořit tenzor druhého řádu, jehož složky budou určeny vztahem $T_{ij} = a_i b_j$. Mějme vektorový prostor $V$ nad tělesem $\mathbb{R}$ a k němu jeho duální prostor $V^*$.

Tenzor setrvačnosti
Už z úvodní motivace ke studiu dynamiky tuhého tělesa je zřejmé, že tenzor setrvačnosti I souvisí s momentem setrvačnosti.

Symbolem $dm$ je označena kolmá vzdálenost elementu tuhého tělesa o objemu $dV$ (resp. hmotnosti $dm = \rho dV$) a přitom víme, že platí vztah (271). Na základě vztahu (243), který byl odvozen při vyšetřování rotace tuhého tělesa kolem pevné osy (rotace s pevnou osou), víme, že vektor úhlové rychlosti $\vec{\omega}$ má směr osy otáčení tuhého tělesa.
Složky tenzoru setrvačnosti jsou definovány integrálem (268), který je vypočítán na základě charakteristik tuhého tělesa (hmotnost, rozložení látky v tuhém tělese, hustota tuhého tělesa, …). Tenzor setrvačnosti je tedy určen pouze na základě charakteristik tuhého tělesa a nezávisí na volbě osy, kolem které se tuhé těleso otáčí. Na volbě této osy závisí až moment setrvačnosti definovaný vztahem (279).
A nebo lze v případě tuhých těles velmi nepravidelných tvarů, u kterých by byl výpočet tenzoru setrvačnosti podle vztahu (268) komplikovaný, postupovat obráceně. Experimentálně určit momenty setrvačnosti tělesa rotujícího podle hlavních os a na základě toho určit tenzor setrvačnosti.
Dosazením definičního vztahu tenzoru setrvačnosti (268) do definičního vztahu momentu setrvačnosti (279) dostaneme $J = \vec{\omega}^T \mathbf{I} \vec{\omega}$. Uvědomíme-li si, že osa rotace je charakterizovaná jednotkovým vektorem $\vec{u}$, můžeme pokračovat v rozpisu vztahu dále (i s využitím obr. 66) $J = \mathbf{I}_{ij} u_i u_j$.
Abychom získali další souvislosti pro praktické výpočty a praktické použití momentu setrvačnosti, upravíme definiční vztah (279) momentu setrvačnosti tak, že jej vydělíme momentem setrvačnosti $J$. Získáme tak výraz $\vec{u} = \frac{1}{J} \mathbf{I} \vec{u}$. Vektor definovaný vztahem (281) má směr osy rotace tuhého tělesa (ta je daná směrem vektoru $\vec{\omega}$), ale jeho velikost je obecně od vektoru $\vec{\omega}$ různá (viz obr. 67).
V bázi hlavních os tedy můžeme vztah (282) upravit na tvar $J = \lambda |\vec{u}|^2$, což je rovnice elipsoidu zapsaná v prostoru.
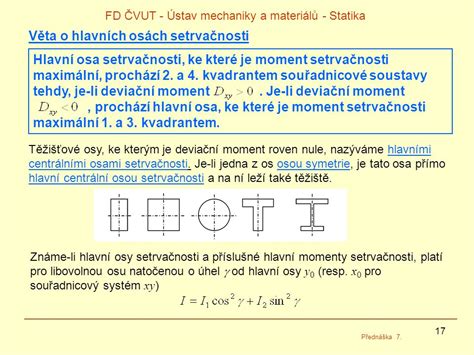
V každém tuhém tělese tedy existují hlavní osy. To znamená, že každému tuhému tělesu lze abstraktně opsat elipsoid setrvačnosti, který v nějakém bodě protíná osu, kolem které tuhé těleso rotuje a která je určená vektorem $\vec{\omega}$. Průsečík elipsoidu setrvačnosti a osy rotace tuhého tělesa má souřadnice, tj. polohový vektor tohoto průsečíku je vektor $\vec{r}$. Velikost tohoto vektoru je $|\vec{r}|$. S využitím definice vektoru $\vec{l}$ ve tvaru (281) můžeme psát $\vec{l} = \mathbf{I} \vec{\omega}$. Moment setrvačnosti tuhého tělesa, který charakterizuje otáčení tohoto tělesa kolem osy dané vektorem $\vec{\omega}$, tedy určujeme pomocí průsečíku této osy s abstraktním elipsoidem setrvačnosti. Při změně polohy osy rotace se změní směr vektoru $\vec{\omega}$ a tedy se změní průsečík této osy s elipsoidem setrvačnosti. Je-li osou rotace tuhého tělesa např. první hlavní osa (tj. je-li $\vec{\omega} = \omega_1 \vec{e}_1$), lze vztah (284) s využitím předchozích informací psát ve tvaru $J_1 = \lambda_1$.
Speciální případy tuhých těles
- Rotační těleso: Pak platí $J_2 = J_3$ a elipsoid setrvačnosti má tvar podobný tvaru na obr. 68.
- Koule: Je elipsoidem setrvačnosti je sféra; navíc v tomto případě je moment setrvačnosti konstantní pro všechny osy, které procházejí těžištěm tuhého tělesa (tj. $J_1 = J_2 = J_3$).
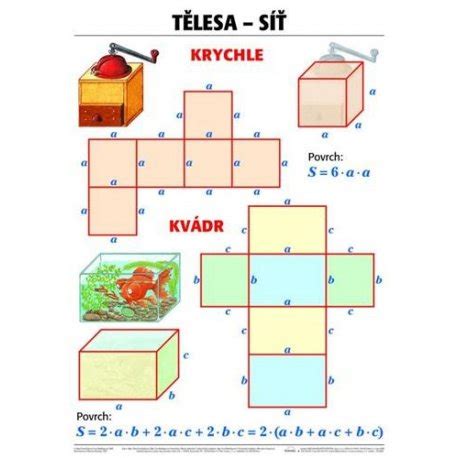
- Krychle: Ta je symetrická a její hlavní osy jsou kolmé na její stěny. Proto je moment setrvačnosti stejný pro všechny osy krychle procházející jejím těžištěm.
Kontrakce tenzorů
Kromě skalárů a vektorů (tj. tenzorů 0. a 1. řádu) se v tenzorovém počtu často pracuje s tenzory vyšších řádů. Tenzory druhého řádu lze například zapsat jako součin dvou vektorů: $T_{ij} = v_i w_j$.
Kontrakcí (úžením) tenzorů rozumíme součet přes každou dvojici dvou stejných indexů v tenzoru $T_{ijk\ldots}$. Kontrakcí tenzoru druhého řádu $T_{ij}$, kdy položíme $i=j$, tak bude $T_{ii} = T_{11} + T_{22} + T_{33} = \text{tr}(\tens{T})$, tedy skalár (stopa tenzoru druhého řádu). Kontrakcí tenzoru čtvrtého řádu $T_{ijkl}$ přes dva páry indexů, např. $T_{iijj} = T_{1111} + T_{1122} + \ldots + T_{3333}$, získáme skalár. Kontrakcí tenzoru $T_{ijkk}$ získáme tenzor druhého řádu $T_{ij}$.
Příklady kontrakce
- Kontrakce tenzoru druhého řádu: $T_{ii} = \sum_i T_{ii}$
- Kontrakce tenzoru čtvrtého řádu: $T_{iijj} = \sum_i \sum_j T_{iijj}$
Kroneckerovo delta $\delta_{ij}$ je definováno jako:
$$ \delta_{ij} = \begin{cases} 1, & \text{pokud } i=j, \\ 0, & \text{pokud } i \neq j. \end{cases} $$
Kroneckerovo delta redukuje sumaci (tj. $\sum_i\sum_jA_{ij}\delta_{ij}=\sum_iA_{ii}$).
Aplikace tenzorů
Tenzor napětí
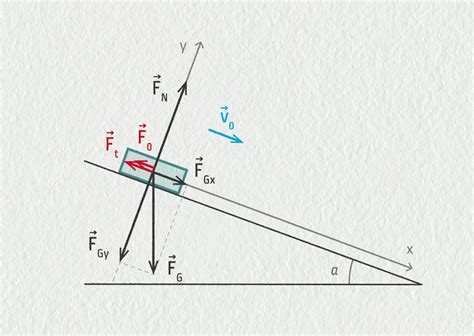
Geometrický význam tenzoru druhého řádu si můžeme přiblížit na příkladu tenzoru napětí. Na těleso konečných rozměrů může, na rozdíl od hmotného bodu, působit síla (síly) takovým způsobem, že v různých bodech tohoto tělesa má vektor síly (výslednice sil) různou velikost a směr. Představme si, že toto těleso se skládá z jednotlivých malých objemových elementů, ohraničených plošnými elementy (pro jednoduchost si představujme malé krychličky s hranami rovnoběžnými s jednotlivými kartézskými osami). Působení síly na každou takovou plošku vybrané krychličky můžeme rozložit na tři nezávislé směry: kolmo (normálově) a rovnoběžně (tangenciálně) ve směru dvou zbývajících os. Protože plošky jsou orientovány také ve třech různých směrech, označíme vždy prvním indexem orientaci každé plošky podle směru její normály a druhým indexem vždy jeden ze tří jednotlivých směrů rozložené síly působící na plošku.
Levi-Civitův symbol
Levi-Civitův symbol $\varepsilon_{ijk}$ je definován pro tři indexy jako:
$$ \varepsilon_{ijk} = \begin{cases} +1, & \text{pokud } (i,j,k) \text{ je sudá permutace } (1,2,3), \\ -1, & \text{pokud } (i,j,k) \text{ je lichá permutace } (1,2,3), \\ 0, & \text{pokud se některé dva indexy opakují.} \end{cases} $$
Velmi užitečná při výpočtech (například vektorových identit nebo působení diferenciálních operátorů) je také souvislost mezi Levi-Civitovým symbolem $\varepsilon_{ijk}$ a Kroneckerovou funkcí $\delta_{ij}$:
$$ \varepsilon_{ijk}\varepsilon_{lmn}=\det \begin{pmatrix} \delta_{il}&\delta_{im}&\delta_{in}\\ \delta_{jl}&\delta_{jm}&\delta_{jn}\\ \delta_{kl}&\delta_{km}&\delta_{kn} \end{pmatrix} $$
Dále platí: $\varepsilon_{ijk}\varepsilon_{jkl}=2\delta_{il}$ a $\varepsilon_{ijk}\varepsilon_{ijk}=6$.
Gradient a divergence tenzorů
Gradient (viz odstavec 5.3) tenzoru zvyšuje tzv. řád tenzoru o jedničku, tj. například z vektoru (tenzoru prvního řádu) vytvoří tenzor druhého řádu, z tenzoru druhého řádu tenzor třetího řádu, atd. Například gradient tenzoru $T_{jk}$ vzhledem k $x_i$ je $\partial_i T_{jk}$.
Divergenci tenzoru můžeme chápat jako kontrakci gradientu, kdy například v rovnici (2.54) položíme $i=k$, dostaneme tak namísto tenzoru třetího řádu tenzor prvního řádu (vektor) se složkami $A_j=\partial T_{jk}/\partial x_k$. Divergence (viz také odstavec 5.3) tenzoru tedy snižuje řád tenzoru o jedničku, tj. například z tenzoru druhého řádu vytvoří vektor, z vektoru skalár, atd.
Pro divergenci tenzoru druhého řádu platí: $\vec{\nabla}\cdot\tens{T}=\frac{\partial T_{ij}}{\partial x_j} \vec{e}_i=\vec{A}$.
Tenzory v obecné relativitě
V obecné relativitě (GR) zavádíme a používáme metrické tenzory zakřiveného prostoročasu. Známá Schwarzschildova metrika popisuje geometrii prostoročasu ve velmi silném gravitačním poli, například v blízkosti (sféricky symetrické, nerotující) černé díry.
$$ ds^2 = -\left(1-\frac{2GM_\bullet}{c^2r}\right)c^2dt^2 + \left(1-\frac{2GM_\bullet}{c^2r}\right)^{-1}dr^2 + r^2(d\theta^2 + \sin^2\theta d\phi^2) $$ kde $M_\bullet$ je hmotnost sférického gravitujícího objektu (zdroje gravitace), $G$ je gravitační konstanta a $c$ je rychlost světla.
Pomocí Christoffelových indexů můžeme zkonstruovat Riemannův (křivostní) tenzor čtvrtého řádu $R^\alpha_{\,\,\,\mu\beta\nu}$ jako zásadní matematický nástroj v GR teorii, který reprezentuje slapové síly, které pociťuje částice (těleso), pohybující se po geodetice (nejkratší spojnici dvou bodů v libovolně zakřiveném prostoročase).
Pomocí kontrakce $R^\alpha_{\,\,\,\mu\alpha\nu}$ Riemannova tenzoru zkonstruujeme symetrický Ricciho (křivostní) tenzor $R_{\mu\nu}=R_{\nu\mu}$, který odráží míru lokální deformace daného metrického tenzoru ve srovnání s Eukleidovským (nebo pseudo-Eukleidovským) prostorem.
Každému bodu Riemannovské variety (libovolně zakřiveného topologického prostoru, na kterém je možné měřit vzdálenosti bodů a úhly tečných vektorů) můžeme přiřadit jedno reálné číslo, dané geometrií metriky v okolí tohoto bodu, takzvaný Ricciho skalár $R$, definovaný jako $R=g^{\mu\nu}R_{\mu\nu}$.
Einsteinovy rovnice v GR: $G_{\mu\nu} = \frac{8\pi G}{c^4} T_{\mu\nu}$, kde celá levá strana je často označována jako Einsteinův tenzor $G_{\mu\nu}$ a kde $T_{\mu\nu}$ je tenzor energie-hybnosti.